
Paper List
-
GOPHER: Optimization-based Phenotype Randomization for Genome-Wide Association Studies with Differential Privacy
This paper addresses the core challenge of balancing rigorous privacy protection with data utility when releasing full GWAS summary statistics, overco...
-
Real-time Cricket Sorting By Sex A low-cost embedded solution using YOLOv8 and Raspberry Pi
This paper addresses the critical bottleneck in industrial insect farming: the lack of automated, real-time sex sorting systems for Acheta domesticus ...
-
Training Dynamics of Learning 3D-Rotational Equivariance
This work addresses the core dilemma of whether to use computationally expensive equivariant architectures or faster symmetry-agnostic models with dat...
-
Fast and Accurate Node-Age Estimation Under Fossil Calibration Uncertainty Using the Adjusted Pairwise Likelihood
This paper addresses the dual challenge of computational inefficiency and sensitivity to fossil calibration errors in Bayesian divergence time estimat...
-
Few-shot Protein Fitness Prediction via In-context Learning and Test-time Training
This paper addresses the core challenge of accurately predicting protein fitness with only a handful of experimental observations, where data collecti...
-
scCluBench: Comprehensive Benchmarking of Clustering Algorithms for Single-Cell RNA Sequencing
This paper addresses the critical gap of fragmented and non-standardized benchmarking in single-cell RNA-seq clustering, which hinders objective compa...
-
Simulation and inference methods for non-Markovian stochastic biochemical reaction networks
This paper addresses the computational bottleneck of simulating and performing Bayesian inference for non-Markovian biochemical systems with history-d...
-
Assessment of Simulation-based Inference Methods for Stochastic Compartmental Models
This paper addresses the core challenge of performing accurate Bayesian parameter inference for stochastic epidemic models when the likelihood functio...
Training Dynamics of Learning 3D-Rotational Equivariance
Genentech Computational Sciences | New York University
30秒速读
IN SHORT: This work addresses the core dilemma of whether to use computationally expensive equivariant architectures or faster symmetry-agnostic models with data augmentation, by quantifying the speed and extent to which the latter learn 3D rotational symmetry.
核心创新
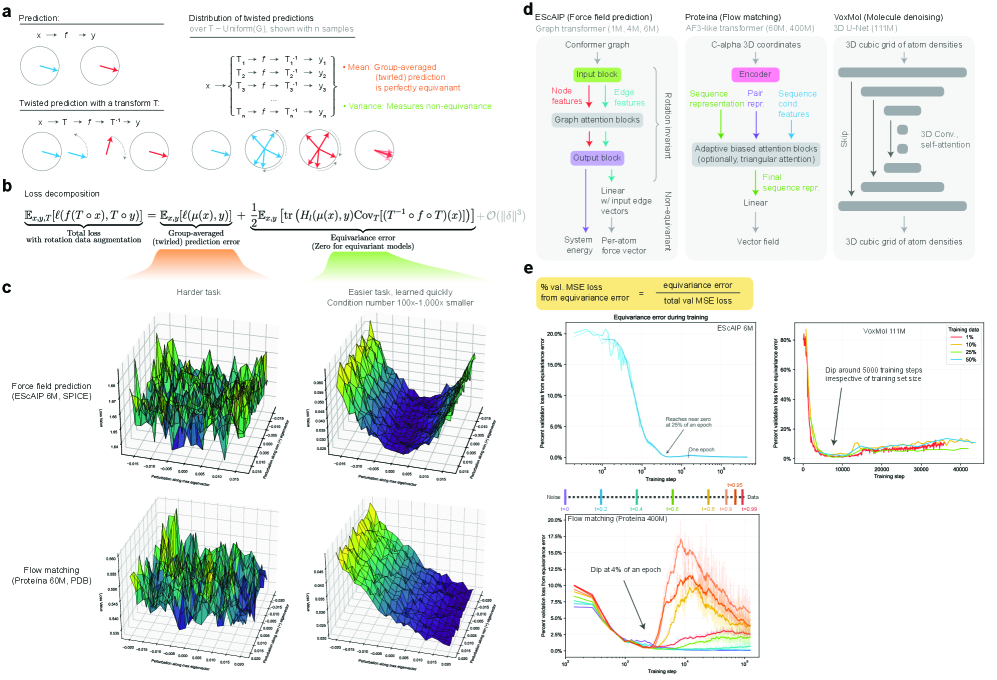
- Methodology Introduces a principled, generalizable framework to decompose total loss into a 'twirled prediction error' (ℒ_mean) and an 'equivariance error' (ℒ_equiv), enabling precise measurement of the percent of loss attributable to imperfect symmetry learning.
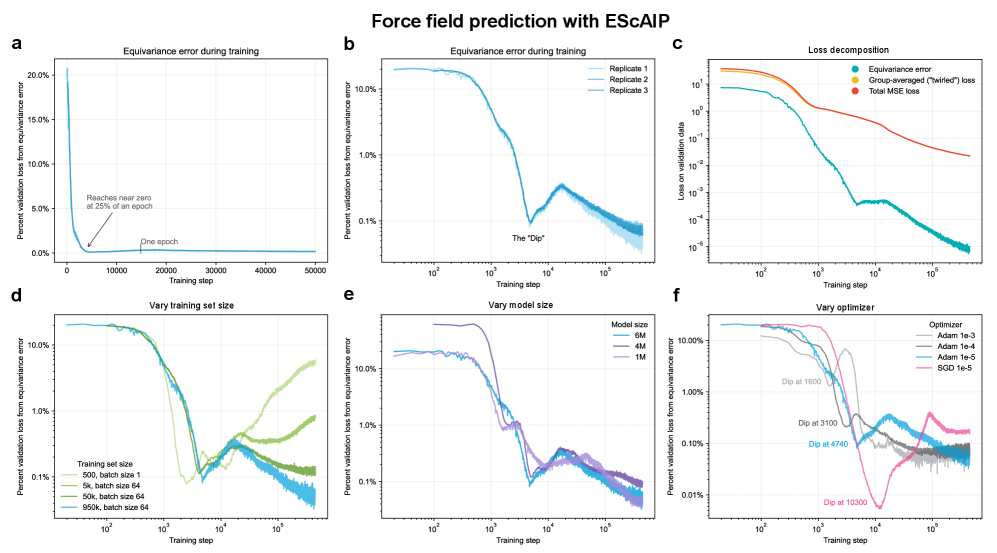
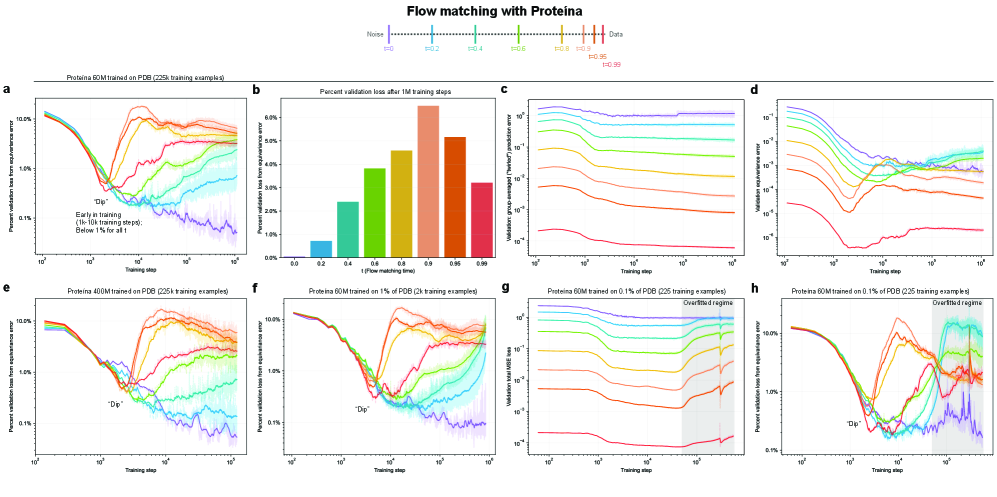
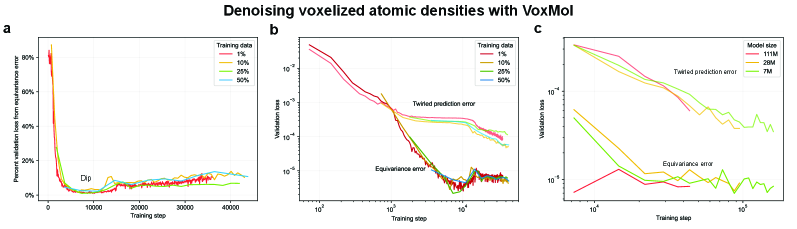
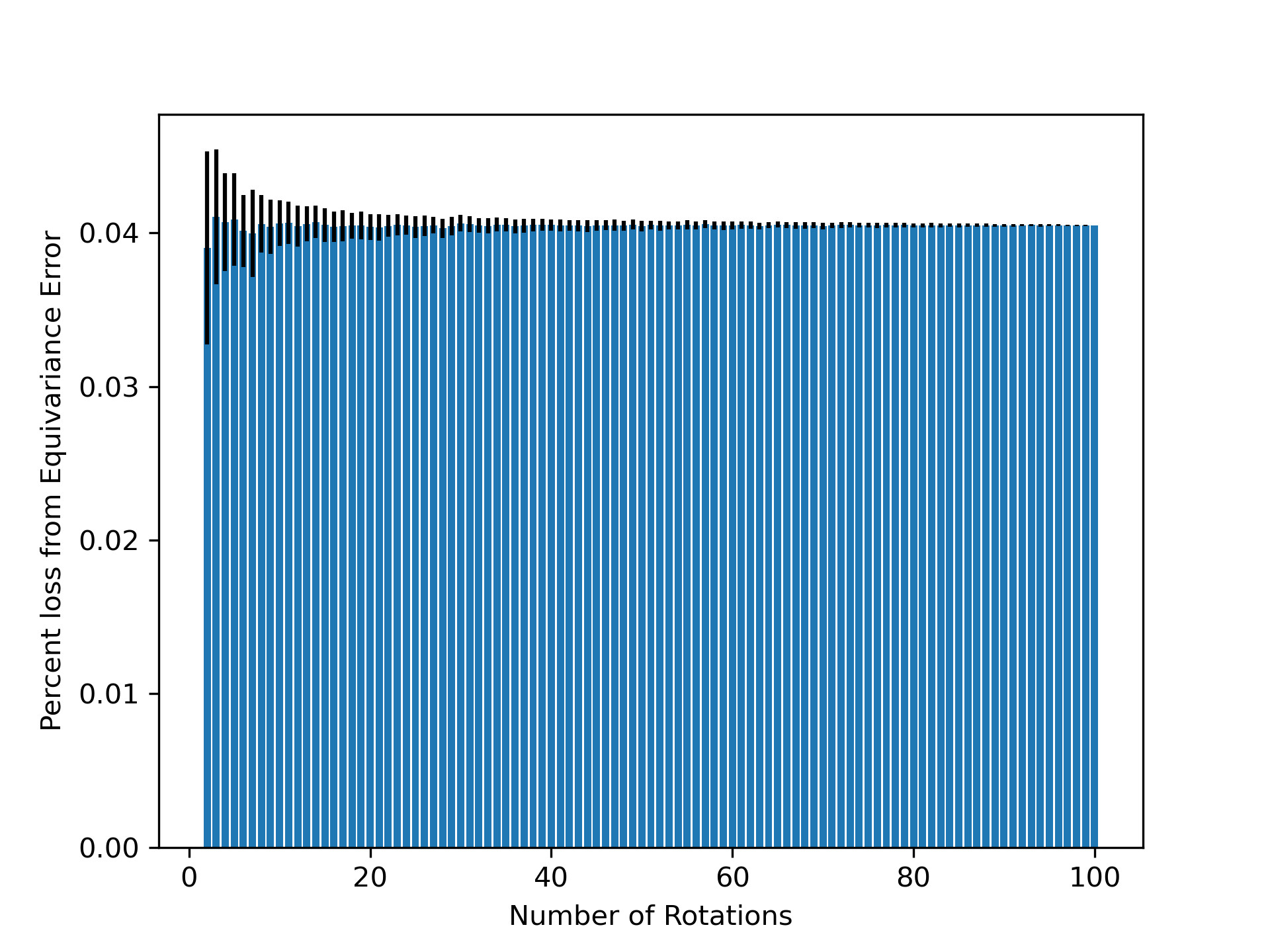
- Methodology Empirically demonstrates that models learning 3D-rotational equivariance via data augmentation achieve very low equivariance error (≤2% of total loss) remarkably quickly, within 1k-10k training steps, across diverse molecular tasks and model scales.
- Theory Provides theoretical and experimental evidence that learning equivariance is an easier task than the main prediction, characterized by a smoother and better-conditioned loss landscape (e.g., 1000x lower condition number for ℒ_equiv vs. ℒ_mean in force field prediction).
主要结论
- Non-equivariant models with data augmentation learn 3D rotational equivariance rapidly and effectively, reducing the equivariance error component to ≤2% of the total validation loss within the first 1k-10k training steps.
- The loss penalty for imperfect equivariance (ℒ_equiv) is small throughout training for 3D rotations, meaning the primary trade-off is the 'efficiency gap' (slower training/inference of equivariant models) rather than a significant accuracy penalty.
- The speed of learning equivariance is robust to model size (1M to 400M parameters), dataset size (500 to 1M samples), and optimizer choice, indicating it is a fundamental property of the learning task landscape.
摘要: While data augmentation is widely used to train symmetry-agnostic models, it remains unclear how quickly and effectively they learn to respect symmetries. We investigate this by deriving a principled measure of equivariance error that, for convex losses, calculates the percent of total loss attributable to imperfections in learned symmetry. We focus our empirical investigation to 3D-rotation equivariance on high-dimensional molecular tasks (flow matching, force field prediction, denoising voxels) and find that models reduce equivariance error quickly to ≤2% held-out loss within 1k-10k training steps, a result robust to model and dataset size. This happens because learning 3D-rotational equivariance is an easier learning task, with a smoother and better-conditioned loss landscape, than the main prediction task. For 3D rotations, the loss penalty for non-equivariant models is small throughout training, so they may achieve lower test loss than equivariant models per GPU-hour unless the equivariant “efficiency gap” is narrowed. We also experimentally and theoretically investigate the relationships between relative equivariance error, learning gradients, and model parameters.